
#include <wefts_thread.h>
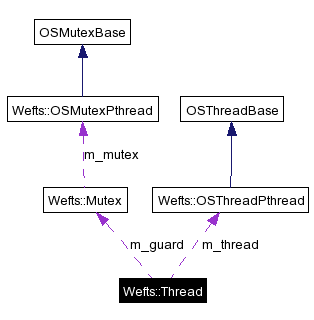
Inheritance diagram for Wefts::Thread:
A thread is an object that can be executed in a separate (parallel) environment.
The applications are required to overload the pure virtual method run(); that method should not be called directly, as the start() method will create a new thread and execute the run() function in parallel with the caller.
If a thread becomes detached during another thread's join(), a NotJoinableError is immediately sent to the joining one.
A Wefts++ thread can be created detached or can be detached at any moment in its run() function with the detach() method. Use this method if you know that no other thread is going to join a running thread.
In both modes, the testCancel() protected member honors cancellation requests immediately, if they have been issued, immediately terminating the thread (and eventually destroying it if it is detached). As it is a protected member, it can be called only by the subclasses, and only if the thread that is calling the test is the one for which run() method has been called on the Thread object.
The thread can also switch to cancellable or uncancellable mode after its creation. The run() method is guaranteed not being interrupted before its execution begins, so it is possible to call the setCancel() protected member to override any default the start() method may have bestowed upon the thread. setCancel() method can also be called later on to "mark" critical sections where, although having access to blocking resources, the thread wish not to be interrupted.
Things NOT TO DO:
There isn't any control over programs misbehaving in this way, so the programmers must take care never doing something like this; anyway, the Cleanup Sequence system provides a good support to automatize this aspect (Cancellation Issues).
Public Member Functions | |
| Thread (OSPriority prio=PrioNormal, int boost=0) | |
| Fills member variables with default values. | |
| virtual | ~Thread () |
| Thread virutal destructor. | |
| bool | start (bool detachable=false, bool cancellable=true) |
| Start asynchronous execution of the run() method. | |
| bool | stop () |
| Issue a stop request on the thread. | |
| void | detach () |
| Set this thread as "detached". | |
| bool | detached () |
| Returns true if thread is in detached state. | |
| virtual void * | join () throw ( NotJoinableError ) |
| Joins a thread, waiting for its termination. | |
| bool | running () |
| Returns true if thread is currently operating. | |
| OSThread * | getThread () |
| Returns the OS specific thread id associated with this thread object. | |
| void | setData (void *data) |
| Set optional specific thread data. | |
| int | sequence () const |
| Returns the sequence count of this thread. | |
| virtual void | cleanup () |
| Termination hook called by the thread termination process. | |
| bool | pushCleanup (CleanupHandler *handler, int value=0) |
| Adds a cleanup handler at thread termination. | |
| bool | popCleanup (bool execute=false) |
| Removes latest registered cleanup handler. | |
| bool | popCleanup (CleanupHandler *handler, bool execute=false) |
| Removes exacly the given cleanup handler, even if it's not the last pushed one. | |
| bool | priority (OSPriority prio, int boost=0) |
| Changes the priority scheduling and boost of this thread. | |
| virtual void * | run ()=0 |
| Main thread function. | |
| void * | getRunReturn () |
| Returns run return code, if run has completed and returned. | |
Protected Member Functions | |
| void | testCancel () |
| Tests if a stop request has been issued, and if so, terminates the thread. | |
| void | setCancel (bool cando) |
| Sets the cancellable thread mode. | |
| void | doDetach () |
| Phisically detaches this thread, removing all unneeded data. | |
Protected Attributes | |
| OSThread | m_thread |
| Machine/os thread identificator for this object. | |
| bool | m_canCancel |
| True if deferred cancellation is turned on. | |
| void * | m_thread_data |
| Optional thread specific data that can be used by this object. | |
| bool | m_detached |
| True if thread is detached. | |
| bool | m_stopped |
| True if the thread has been stopped at low level (exit pending). | |
| bool | m_wasCanceled |
| True if the thread received a stop() request while cancellation is disabled. | |
| volatile bool | m_running |
| True if thread if running. | |
| int | m_thSequence |
| This is the count of threads previously started plus two. | |
Private Member Functions | |
| virtual void | executionEnd () |
| Minimal thraed termination routines. | |
| void | setCancel () |
| Used internally to communicate the low-level threading system what cancellation mode is used. | |
Private Attributes | |
| CleanupList | m_cleanupHandlers |
| Stack of cleanup handlers to call at termination. | |
| OSPriority | m_reqPriority |
| Requested scheduling policy. | |
| int | m_reqBoost |
| Requested priority boost. | |
| Mutex | m_guard |
| Internal mutex used to protect concurrent access to internal variables. | |
| void * | m_runReturn |
| Used by the C cleanup routine to set the return value on need. | |
Friends | |
| void | s_ThreadCleanupper (void *) |
| Function used (internally) to invoke thread->cleanup() in case of cancellation. | |
| void * | s_ThreadRunner (void *) |
| void * | s_ThreadRunFunc (void *) |
| Function used (internally) to invoke thread->run(). | |
|
||||||||||||
|
Fills member variables with default values.
To automatically deallocate the thread item on termination, use start( true ); this makes the thread "detached", that will destroy the pointer to the thread object created by the constructor. If there is the need to access the thread after is termination, join it and work on the thread pointer; then delete it. Deleting a thread object after that the thread routine is terminated is safe. Long story short: thread objects are meant to be created only via the new constructor, or equivalent dynamic memory allocation method. The caller can set a default scheduling policy, and eventually a default priority boost, that will be enacted on the thread as soon as it is created. There may be some delay between the creation of the thread and the schedule policy change.
|
|
|
Thread virutal destructor. The destructor is meant to clean thread data after that thre thread has terminated. This implies that calling it while the thread is or may be still running (or at least, may be still engaged in its run() method) is generally a very bad idea. Anyhow, mimimal actions are taken to provide a protection against total disaster in the most common case. In particular, if the deleted thread is not the current running one, the thread is stopped and joined. This means that if the target thread is unstoppable you may have to wait long, and if it is deadlocked, the thread calling the destructor will be deadlocked too. If the calling thread is the one that is currently under execution, the thread is automatically detached, so right after the destructor does its business, system resources are automatically freed. If you know what you are doing, explicitly destroying a thread heap allocated variable is a shortcut for:
and as join(), it can rise a NotJoinableError in case the thread becomes not joinable in the meanwhile; a detached thread has no safe way to be told by the destructor that it's going to be destroyed externally; it may ignore any stop() request and call its own destructor. For this reason, an assertion is failed (and the program aborts) if the thread is or becomes detachable during the destructor join(). Notice also that if the run() method returned a meaningful value, delete operator won't clean it, and a memory leak will be generated. In general, the correct and fault free sequence to cleanly delete a thread is:
You can avoid the try/catch block if the target thread is not detachable. It is absolutely safe (and will not lead to error throws) to call the destructor on a terminated thread.
|
|
|
Termination hook called by the thread termination process. This method is called just before the thread terminates, and if the thread is detached, also just before thread destructor. This gives a chance to this thread to provide cleanup actions (as freeing mutexes not previously releases, close files and connections, logging the imminent termination, signaling in member variables things that an eventual join()er should know etc.). The Thread class implementation of cleanup() calls all the cleanup functions, so a subthread is advised to call Thread::cleanup(), at least if it can check that there are pending cleanup handlers, or suspects it. A subclass may also declare itself derived from both Thread and CleanupHandler, and then use pushCleanupHandler( this ) to subscribe itself to the thread object, instead of overloading this method; overloading is more efficient, but this latter strategy may be useful if the thread knows that many other cleanup handlers will be called randomly, and that its cleanup code must be queued in proper order.
|
|
|
Set this thread as "detached". Set the thread type to detached: at thread termination, the object encapsulating this thread will be deleted (as well as OS resources needed to run this thread). This choice is not reversible; once a thread is detached, it can't be set to non-detachable state. A joining thread waiting for this thread to terminate will immediately receive a NotJoinableError.
|
|
|
Returns true if thread is in detached state.
|
|
|
Phisically detaches this thread, removing all unneeded data. The detach() method only singals that this thread will not be joined by anyone, so (future) joiners are advised and the cleanup routine knows how to handle this thread. The job of signaling to OS that this thread is to be destroyed upon termination is done by this method. This is usually called by the automatic cleanup routine, but if there is some reason by which you want to terminate cleanly the thread with an early m_thread.exit(), you can use this doDetach() to prevent memory leaks. |
|
|
Returns run return code, if run has completed and returned. If this not happened, 0 is returned. |
|
|
Returns the OS specific thread id associated with this thread object.
|
|
|
Joins a thread, waiting for its termination. This method makes the caller to wait for this thread to be terminated. It can return in three cases:
If a join() trows a NotJoinableError, the caller should never use anymore the called object: in fact, a detached thread is destroyed before join can return, and using it would cause an immediate crash, while if the calling thread is awaken by a signal, there is no safe way to know if the joined thread will still be valid when the joiner tries to handle it.
Reimplemented in Wefts::MoaningThread. |
|
||||||||||||
|
Removes exacly the given cleanup handler, even if it's not the last pushed one. Of course, the cleanup handler removed is the first one of the same kind of the pushed one; this is used to avoid mixing cleanup handlers from different classes that may interleave in cleanup calls.
|
|
|
Removes latest registered cleanup handler. If execute is set to true, the cleanup code will be executed immediately.
|
|
||||||||||||
|
Changes the priority scheduling and boost of this thread.
|
|
||||||||||||
|
Adds a cleanup handler at thread termination. This method will return true unless the thread has been requested to stop, or it is already engaged in the cleanup process. Cleanup handlers are executed in a LIFO order (they are stacked and the last one arrive is the first that will be called).
|
|
|
Main thread function. This pure virtual method must be overloaded by subclasses to implement the thread main rountine. This is executed after that start() method launches the new thread. It is possible to call run() directly i.e. when your class may run both in parallel ( run() is called indirectly by start() ) and sequence ( run() is called directly by the caller ). The return value is available to communicate directly with a thread evetnaully joining this one: the returned void pointer will be passed as return of the other thread join() method. Joining a detached thread will always result in a void return, regardless of what run() method returned. Also, if the thread is not detached, after its termination the return value of this method is available by calling getRunReturn().
So, unless you have special reasons, run() method should always return 0. |
|
|
Returns true if thread is currently operating. There may be a little time in which the thread is reported to be running, but the run() method is still not executed, and another in which the thread is reported not to be running, but the OS level thread is still not terminated. Anyway, this problem can be safely ignored, as in the first case, nothing is going to stop the thread from run as soon as possible, and the OS resource for the thread are ready to go, while in the latter case the Wefts thread is not operating anymore and the OS level thread will be terminated as soon as possible. (It is under all aspects a "dead thread walking" :-) |
|
|
Returns the sequence count of this thread. Used for reference and debugging purposes. The main thread has a "vritual" sequence of 1; the threads started with start() method have a number ranging from 2 to MAXINT. Notice that this sequence count is invalid if thread has not been started yet (i.e. if you are running the run() method sequentially.
|
|
|
Sets the cancellable thread mode. If the parameter is ture, the thread can be canceled at wait or blocking points, as waits for OS calls to return or in Wefts::Sleep() calls. If set false, only an explicit testCancel() call, or a hand-made check on the m_stopped member variable will terminate the thread upon request.
|
|
|
Used internally to communicate the low-level threading system what cancellation mode is used.
|
|
|
Set optional specific thread data.
|
|
||||||||||||
|
Start asynchronous execution of the run() method. The execution of the run method is started as soon as possible, but both the m_thid and m_thSequence members are immediately set; also the count of active threads is updated immediately.
|
|
|
Issue a stop request on the thread. The thread will honor the request depeding on its current cancellable policy and on its own decision. Is thus important designing threads so that they never enter endless loops or deadlocks so that they can't check for stop requests being issued. Stop() method will stop the thread, privided it's running. If the cancellation is currently disabled the stop request will be cached; in the case cancellation is re-enabled, the stop request is re-iterated. Note that this does not makes setCancel() a cancellation point; reiterating at low level the stop request will not cause termination of the thread until a cancellation point is met. Simply, if setCancel() is disabled, stop() won't do nothing except (atomically) recording the fact that it has been called; this fact will become meaningful only in the event of cancellation being enabled in a second moment.
|
|
|
Tests if a stop request has been issued, and if so, terminates the thread. This method works the same both if the thread is cancellable or not. Indeed, if the thread is not cancellable, this is the best way to honor eventual cancellation requets issued in the meanwhile. Also, this can be useful in testing for cancellation requests issued while the thread is engaged in long computations. |
|
|
Function used (internally) to invoke thread->cleanup() in case of cancellation. As this function is the only one that has the right to delete the thread object in case of detached thread, this function is also responsible to set the m_runReturn parameter in case the thread is NOT detached. For this reasion, this function is fed with a ThreadAndReturn pointer as parameter.
|
|
|
Function used (internally) to invoke thread->run().
|
|
|
|
|
|
True if deferred cancellation is turned on.
|
|
|
Stack of cleanup handlers to call at termination.
|
|
|
True if thread is detached.
|
|
|
Internal mutex used to protect concurrent access to internal variables.
|
|
|
Requested priority boost.
|
|
|
Requested scheduling policy.
|
|
|
True if thread if running.
|
|
|
Used by the C cleanup routine to set the return value on need.
|
|
|
True if the thread has been stopped at low level (exit pending).
|
|
|
Machine/os thread identificator for this object.
|
|
|
Optional thread specific data that can be used by this object.
|
|
|
This is the count of threads previously started plus two.
|
|
|
True if the thread received a stop() request while cancellation is disabled.
|
 1.3.7
1.3.7